盤點美國大狗機器人中的感測器技術運用
【中國化工儀器網 行業動態】目前,智能無人系統種類多樣,類型豐富。主要包括空中飛行的無人機、飛艇,地面上作業的機器人、自主地面車輛,水中的無人潛航器、水下機器人等三大類,還有空間站機器人、微型衛星、工業機械臂等眾多旁支。目前,隨著智能化無人...【中國化工儀器網 行業動態】目前,智能無人系統種類多樣,類型豐富。主要包括空中飛行的無人機、飛艇,地面上作業的機器人、自主地面車輛,水中的無人潛航器、水下機器人等三大類,還有空間站機器人、微型衛星、工業機械臂等眾多旁支。目前,隨著智能化無人系統的概念的普及、感測器和微型處理器技術的發展,智能無人系統已開始在社會生活中嶄露頭角,大大地推動了信息融合技術的研究和應用。美國研究人員開發的「大狗」(Big Dog)機器人便是其中一例。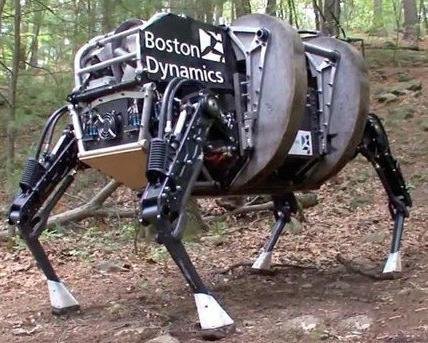
盤點美國大狗機器人中的感測器技術運用
在戰場上,當美軍在對堅固設防區實施有準備的進攻作戰時,會動用偵察車、夜視器材、雷達、地面感測器等,必要時使用巷戰的智能機器人、無人駕駛偵察機、高級電子感測器等。這款「大狗」機器人,便是由美國波士頓動力學工程公司專為美國軍隊設計研發的。研發成功後,到2015年,「大狗」機器人就已經進入了阿富汗地區開展試驗,對機器人和士兵的協同作戰功能進行了初步驗證。
作為形似機械狗的四足機器人,「大狗」機器人體重和大型犬相當,在交通不便的地區能夠為士兵運送彈藥、食物和其他物品,能夠行走和奔跑,還可跨越一定高度的障礙物。
大狗機器人身上的感測器類型據了解,「大狗」機器人總共安裝有約50個感測器,這些感測器能夠用於監測車身的姿態與加速、關節的運動和力度、發動機的轉速和內部機械裝置的溫度和液壓。
「大狗」機器人頭部立體攝像系統可提供精確的三維地形圖,姿態感測器能提供當前的姿態和加速度,而壓力、位置感測器則可反饋關節當前的運動狀態和餘量,溫度、壓力感測器還可以監測系統的健康狀態。這樣一來,多種感測器收集到的信息全部傳遞迴「大腦」後,通過信息融合演算法,經過類似人腦的處理過程,「大狗」便可以作出正確的指揮。
在實際操作中,「大狗」機器人最大的特點是,能夠展示以多種運動方式與速度運動。「大狗」機器人通過控制它的四條腿,能夠站起來,蹲下去,爬行,小跑,甚至快速跳躍前進。這一連串的動作,離不開它身體和腿部的智能化構造與感知系統。
體內裝有汽油發動機提供全身動力
具體來說,「大狗」的身體是一種鋼架結構,內裝有圓筒形汽油發動機,來為「大狗」的水壓系統、電腦和慣性測算單元(IMU)提供動力。其中,慣性測算單元是機器狗的重要組成部分,它使用光纖激光陀螺儀和一組加速器跟蹤機器狗的運動和位置。這些裝置與四條腿一起發揮作用,就可以使它邁出準確的步伐。為與人類行走的速度一致,它還採用了一種動態平衡小跑步態,即利用橫向速度與加速度來保持平衡。通過一些慣性感測器與控制系統精確控制分配給各條腿的運動力量和地面反應力量,來優化它的負重能力。
腿部關節利用感測器探測地勢變化
談到大狗的腿部,它的腿由鋁製成,每條腿有三個靠傳動裝置提供動力的關節,並有一個「彈性」關節,利用水壓刺激器,電腦每秒可以重新將關節配置500次。關節上裝有感測器,負責測量力量和位置,探測地勢變化,電腦參照這些數據,結合從慣性測算單元獲得的信息,確定四條腿應該是抬起還是放下,向右走還是向左走。通過調整關節的水壓液體的流動,電腦可以將每一隻爪子準確地放下。
例如,如果有一條腿比預期更早地碰到了地面,計算機就會認為它可能踩到了岩石或是山坡,然後「大狗」機器人就會相應地調節自己的步伐。而當遭到外界「騷擾」時,例如踹它一腳時,「大狗」的主動平衡性使其可以保持穩定。
(原標題:美國大狗機器人中都有哪些感測器技術運用?)
[圖擷取自網路,如有疑問請私訊]
|
本篇 |
不想錯過? 請追蹤FB專頁! |
| 喜歡這篇嗎?快分享吧! |








相關文章






Fun88